SOFTMANBOT is an industrial-end-user driven project that will provide an innovative and holistic robotic system for the handling of flexible and deformable materials within labor-intensive production processes.
The robotic system will be composed by three main pillars including a generic robotic perception system (perception of the product and the human operator), a multi-sensor control and planning platform (advanced control algorithms for shape and contact servoing, AI based task generalization) and smart dexterous grippers (smart mechanical design which will embody grasping/manipulation skills and integrate sensors – mainly tactile – for identifying precisely the contact state between the product and the gripper) able to handle soft components with high-levels of robustness and flexibility.
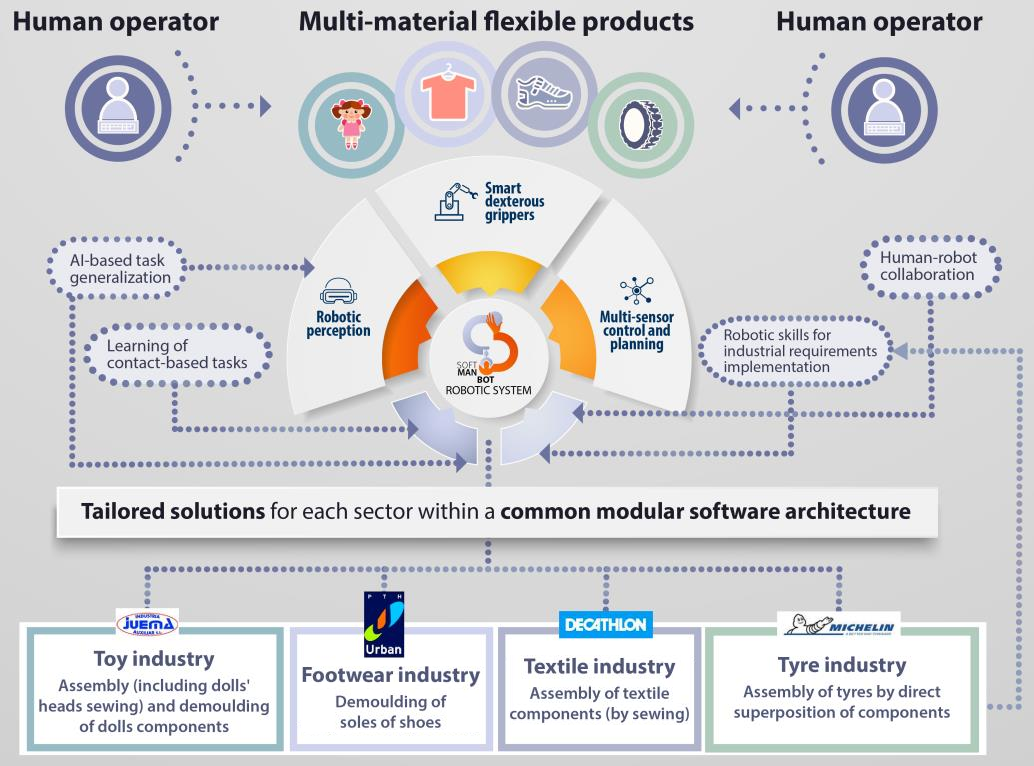
The automation solution is aimed to work in close collaboration with human operators in order to help them in the execution of contact-based challenging tasks so that the productivity and job quality will be boosted which will highly contribute to bring back production to Europe.
In order to facilitate the assessment of the performance, transferability, scalability and large scale deployment of these solutions, the demonstrations will be conducted under real industrially relevant environments in four pilot demonstrators involving four key manufacturing sectors:
Toys
Textile
Footwear
Tyres
The project is not just aiming at quantitative improvements brought by cutting-edge technologies in a specific sector, but to use technology innovation to support a change of paradigm where handling of soft materials with the involvement of robots become a feasible and widespread alternative for European factories, specially SMEs.
The overall objective of the project is to develop and demonstrate an innovative and universal approach to robotic handling of flexible and deformable materials based on the integration of advanced manufacturing technologies for the automation of contact-based tasks supported by a smart robotic perception system, a multi-sensor planning and control platform and the deployment of intelligent and universally dexterous grippers able to handle soft components with high-levels of robustness and flexibility. This will be achieved by accomplishing the following Scientific and technical S/T objectives:
O1. To design a modular and interoperable architecture integrating the different systems and hardware and software components of the SOFTMANBOT robotic solution; including their interconnections and dependences. For this purpose requirements (functional and non-functional) from the targeted industrial sectors and specific KPIs (performance and quality parameters) will be defined
O2. To develop a robotic perception platform for real-time parametrization and tracking of the deformation and contact state of complex flexible products integrating learning strategies. For this purpose, the platform will incorporate three main components dealing with: C1) Visual deformation perception; C2) Contact perception and C3) Perception of the interaction of human operators. The model of the products and humans will be implemented and validated
O3. To develop a multi-sensor planning and control system that taking as inputs the model of the product and the model of the human-robot interactions (O2 output) will implement robot skills for handling the deformation and contact of the product, establish a sequence of actions for performing the tasks, define the required outputs for interacting with the human and finally parameterize in a generic way the tasks to be done. For this purpose, the platform will incorporate four main components dealing with: C1) Multi-modal control for precise contact; C2) Planning for contact-based task execution; C3) Interface for collaboration with the HRI and C4) Task generalization through AI.
O4. To design and develop intelligent, dexterous and low-cost grippers for deformable object handling integrating embedded sensors (tactile, force, proximity, vision…) and a smart mechanical structure (embodiment of grasping/manipulation skills) able to execute handling challenging tasks with high-levels of precision, fault tolerance robustness and flexibility within harshly and changing environments.
O5. To integrate the developed technological components and modules (O2-O3-O4 outputs) for the design of cost-effective and adaptive solutions for industrial applications. This will include the design of specific mock-ups and robotic cells to be implemented in the different pilot cases, guaranteeing the alignment and compatibility with the defined global architecture (O1 output).
O6. To validate the project results in a cost effective way under real industrial conditions through 4 pilot demonstrations in four European factories (toy, textile, footwear Execution time of demoulding tasks and tyre sectors).
O7. To deliver an environmental (LCA), economic and social evaluation of the whole SOFTMANBOT solution, including a user acceptance assessment.
O8. To execute in a coordinated manner dissemination, exploitation & communication plans to maximize the project technical, social and economic impact within the demo clusters and across Europe.
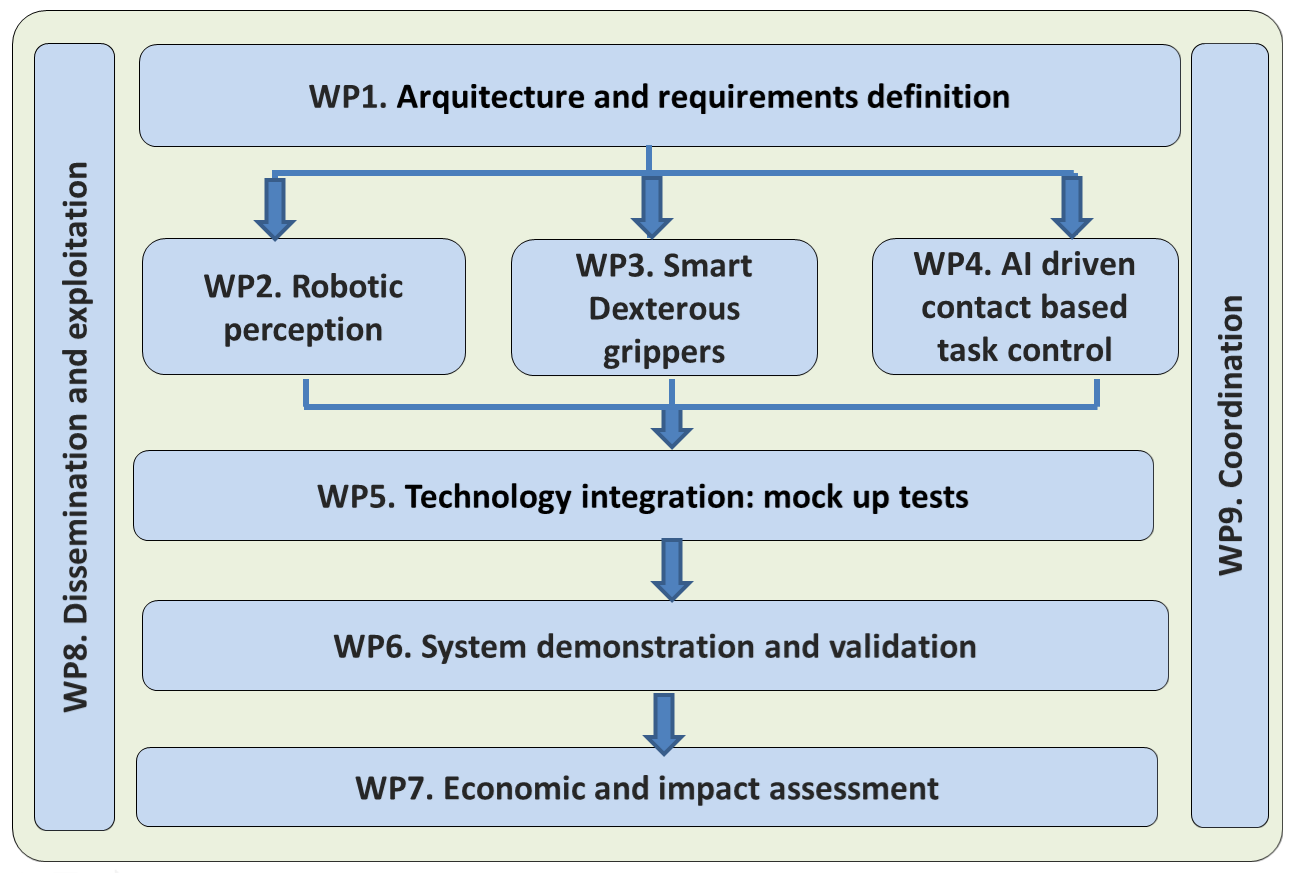
In order to complete the aim of the project, The SOFTMANBOT project will be run over 42 months with a work plan divided into 9 Work Packages:

This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement nº 869855