Robotic manipulation of deformable materials is inherently challenging due to the need to maintain tension and the high dimensionality of the state of the material. These applications require the control of the desired contact forces, desired shapes, and precise position of the components.
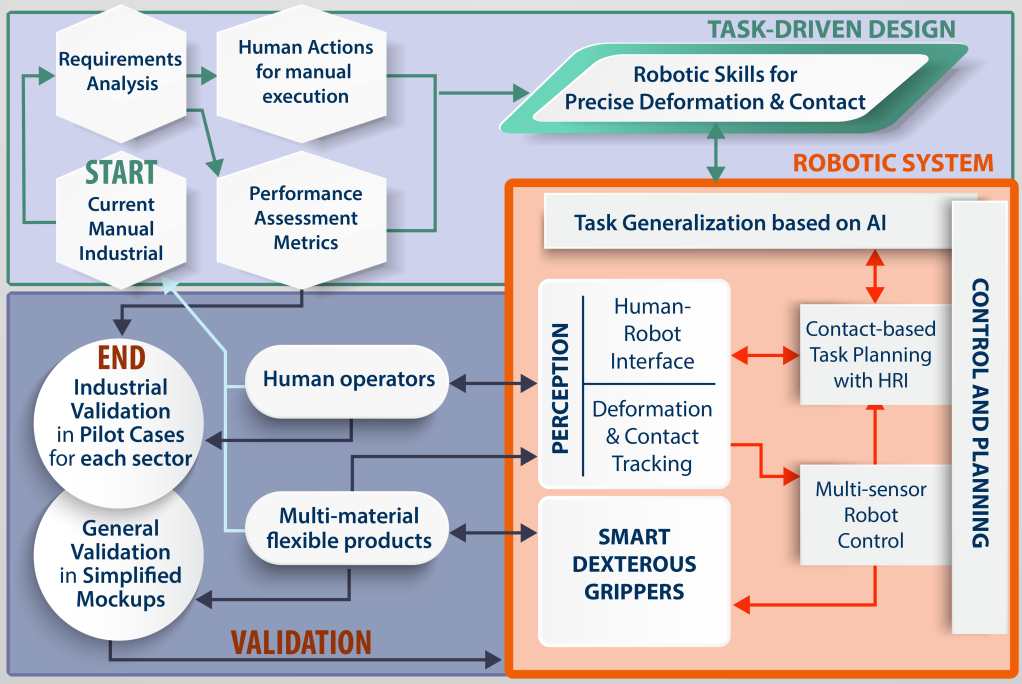
Taking into account this critical challenge, the SOFTMANBOT project proposes an holistic robotic handling ecosystem, as an integrated, scalable and yet installation-specific solution for the semi-automated manipulation of soft materials in production processes.

This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement nº 869855