Sorbonne Université has developed a new approach to deformable manipulation based on physically realistic continuum models.
The goal of this approach is to generate a suitable robotic trajectory to realize a deformable object manipulation task in an industrial environment. Two main success metrics are defined: the realization of the task (ie. sole demolding, doll demolding, tire alignment, …), and the state of the object at the end of the manipulation.
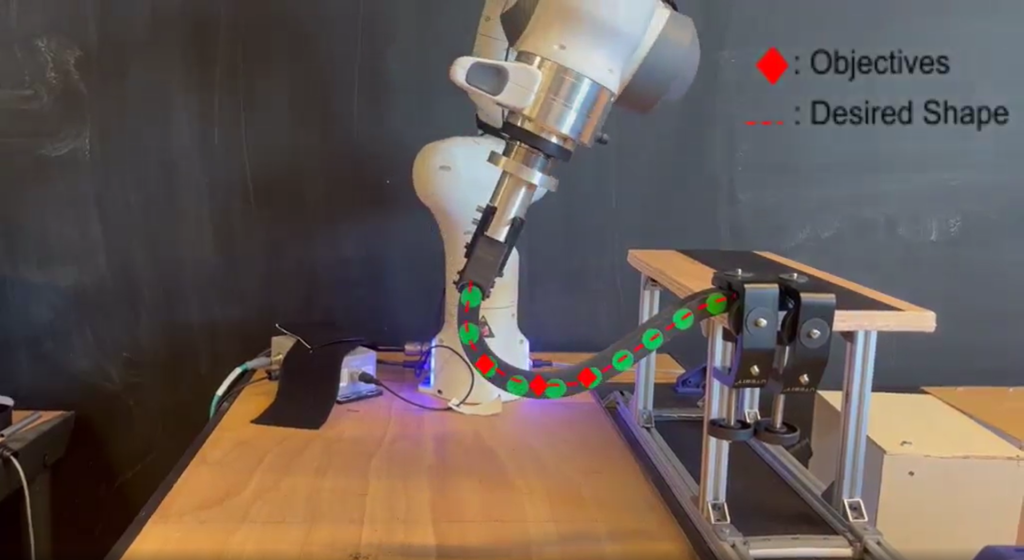
Softmaterials can be very fragile and if the robot applies too much strains on it, the deformation can cause damage to the product. The approach relies on a multi-objectives optimization function that generate an optimal robotic motion to successfuly accomplish the required manipulation task while also minimizing the strains it applies on the product.
Since it can be difficult to perfectly control all the initial conditions in a factory environment, USORB has also implemented an impedance controller which allows, to and extend, non modeled dynamics of the object to guide the robot, therefore making the approach robust to modeling and initial conditions errors and uncertainties.
The resulting article has been accepted for publication at AIM 2023 conference in Seattle.
You can see video at the following link: https://www.linkedin.com/feed/update/urn:li:activity:7053660142344577024