PROJECT OVERVIEW
We are developing an innovative and universal approach for handling deformable and flexible materials for the industry.
We are integrating advanced manufacturing technologies for the automation of contact-based tasks, using a smart robotic perception system, a multi-sensor planning and control platform, and intelligent and universally dexterous grippers.
Discover more

Our Consortium
Our consortium is integrated by strategic institutions on four main axes: Industries, Small to Medium Enterprises, Research Centers, and Universities.

Latest News
Lorem ipsum dolor sit amet, consectetur adipisicing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat.

Seventh newsletter
Our Seventh newsletter is out now! After almost two months since the official conclusion of the Softmanbot project, we are excited to share our seventh and final newsletter with you.We have dedicated over three[…]
Read more
SOFTMANBOT final meeting
Here is a photo of the entire SOFTMANBOT EU H2020 project team during the final meeting. The life of the project allowed each member to actively collaborate on every task set from[…]
Read more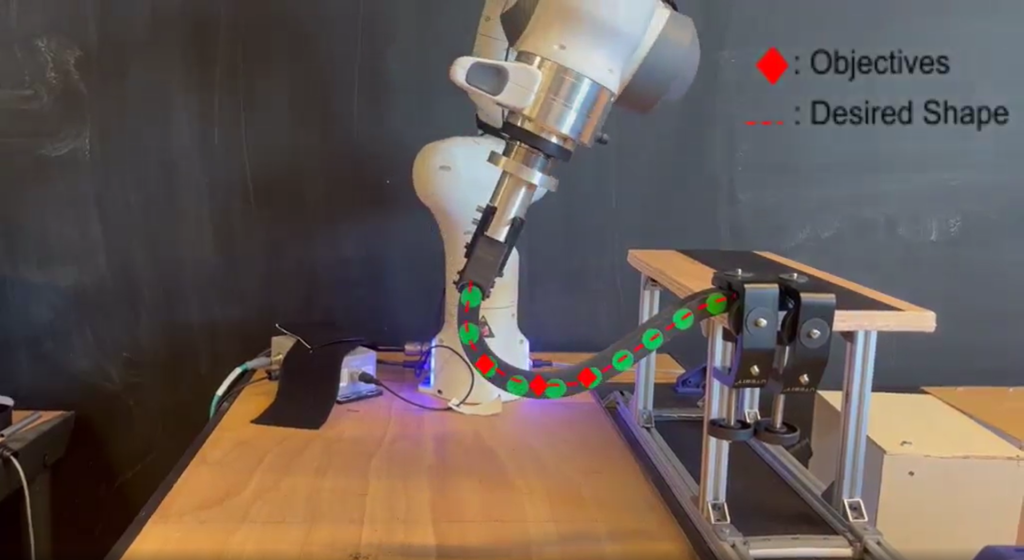
A new approach to deformable manipulation based on physically realistic continuum models.
Sorbonne Université has developed a new approach to deformable manipulation based on physically realistic continuum models. The goal of this approach is to generate a suitable robotic trajectory to realize a deformable object manipulation task[…]
Read more