
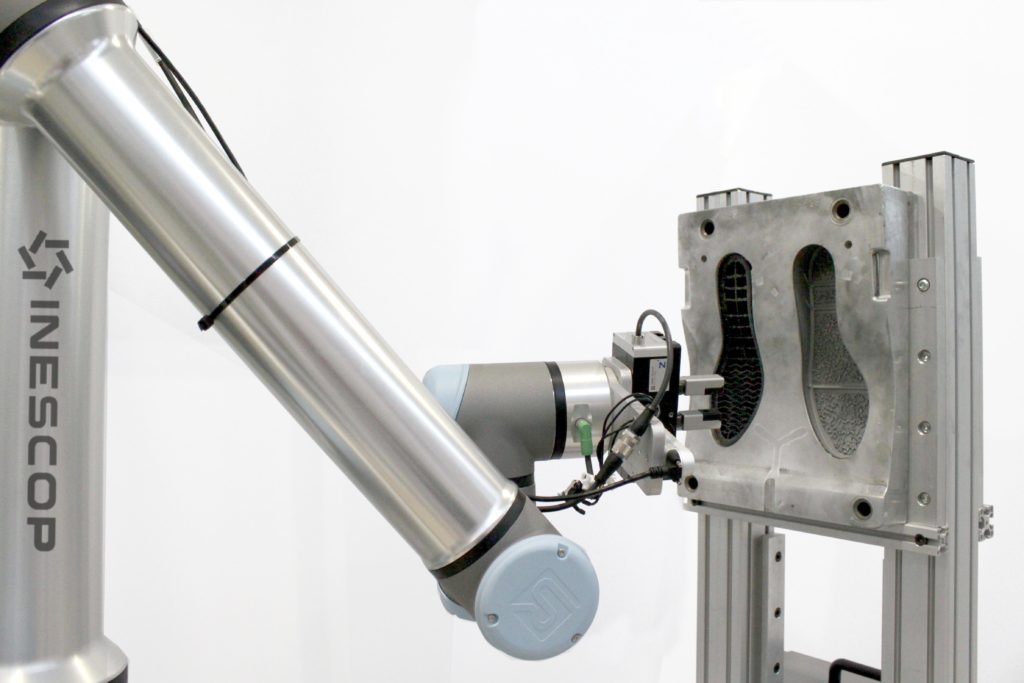
The Footwear Technology Centre, INESCOP, within the framework of the European SoftManBot project, is working on the development of a robotic system for the sole demoulding, with the aim of protecting the health of workers, as well as freeing them from repetitive tasks that require a lot of strength.
The footwear industry, traditionally a manufacturing and scarcely automated one, usually relies on simple conventional machinery, very focused on obtaining a good final product, but without taking into account ergonomic conditions, leading to risky working environments.
The task of demoulding injected soles is a clear example of this. Often the complexity of removing soles from moulds is linked to fashion requirements, and the trend is towards more and more aesthetically appealing designs, but at the same time, more complex from a manufacturing point of view.
Typically, the operator attaches various decorations, technical parts or brand inserts, after which the machine cycle begins. After injection, when the mould reaches a suitable temperature, the operator has to remove the soles, which requires dexterity and the use of considerable strength, as well as risky postures. If we add to this the repetitiveness of the task, the possibility of injury to the operator in the medium and long term increases exponentially, so delegating the responsibility for extracting the soles to an automatic system, supervised by the operator, is therefore to be considered.

And so the SoftManBot project was launched, an industrial project that aims to develop a holistic and transversal robotic system for the handling of deformable and flexible materials used in the manufacture of footwear, toys, textiles and tyres.
In the case of footwear, INESCOP identified and aligned the global objectives of SoftManBot with the needs of the task of demoulding injected soles in order to work together with other project partners on its automation.
The robotisation of this task poses a great challenge at a technological level due to the diversity of the materials injected and the models produced, which leads to a great variability in the extraction strategies. To this end, INESCOP, together with its industrial partner PLASTINHER URBAN, chose a sample of 12 models which are representative of the different peculiarities of this task.

Achieving this industrial solution would also ensure the safety of operators who would share a workspace with a robot, thus creating a flexible system adaptable to different environments.
Work is currently underway on the development of the mock-up, which incorporates the latest technological advances, such as the use of Artificial Intelligence, which provides the robotic system with vision capable of identifying the best gripping point or generating extraction paths that are similar in terms of dexterity and effectiveness to those carried out by operators, or in the development of intelligent robotic grippers capable of detecting slippage in the grip and recovering if it happens.
Recent Comments