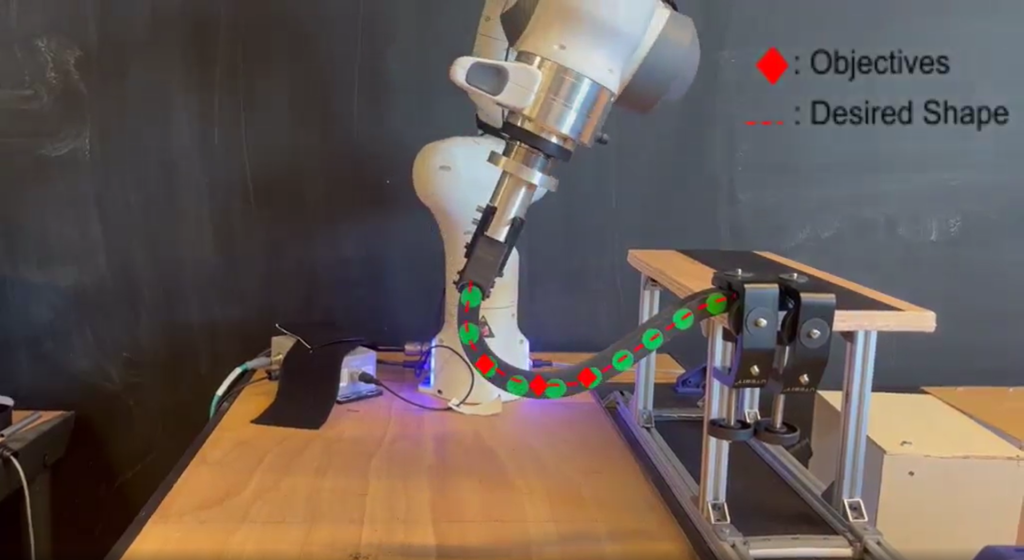
A new approach to deformable manipulation based on physically realistic continuum models.
Sorbonne Université has developed a new approach to deformable manipulation based on physically realistic continuum models. The goal of this approach is to generate a suitable robotic trajectory to realize a deformable object manipulation task in an industrial environment. Two main success metrics are defined: the realization of the task (ie. sole demolding, doll demolding, tire alignment, …), and the state of…
Read more






Recent Comments