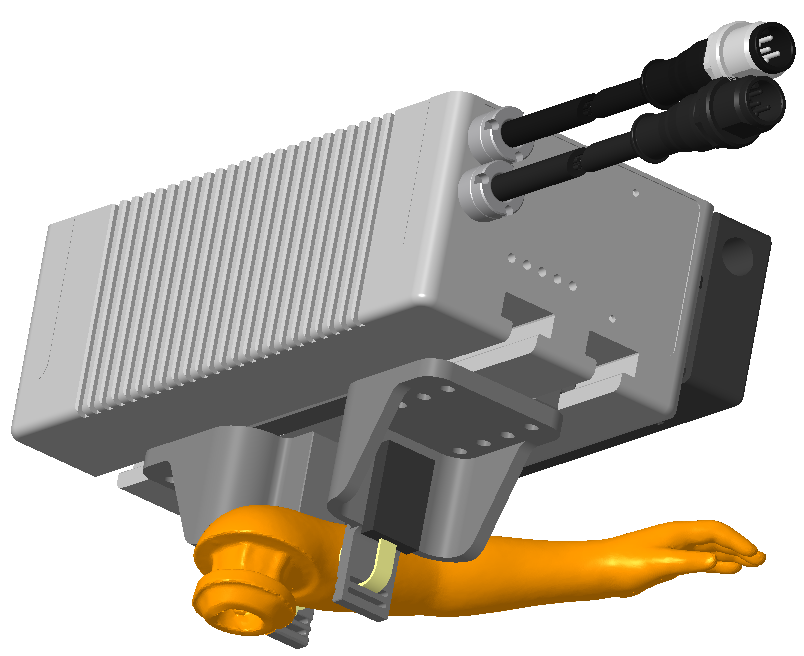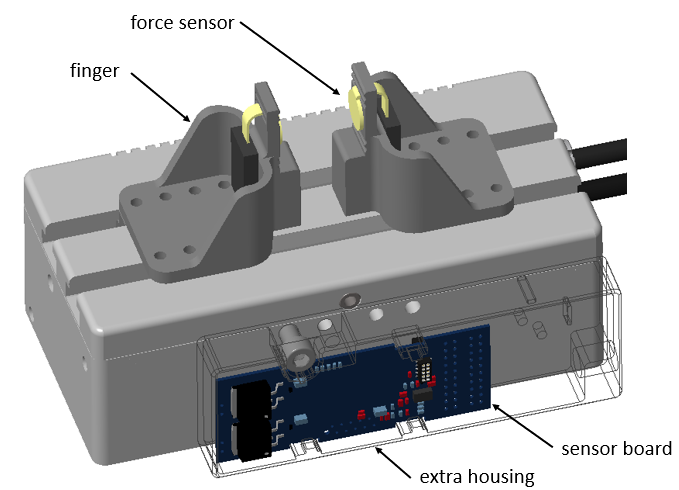
At #ZimmerGroup, the final steps are currently being taken to integrate the force sensors directly into the gripper prototype developed for #SOFTMANBOT. The aim is to bring this into operation next month at our partner #JUEMA ‘s industrial demonstrator. The sensor data is fed directly into the controller of the mechatronic gripper using a special sensor board.
Custom-programmed driving profiles read out the force value live and compare it with the target provided by the higher-level PLC. The gripper internal regulation circuit now derives new commands for the gripper until the target value is reached.
Once this is achieved, the gripper sends finger position data back to the PLC, where the deformation of the workpiece can be checked against the values from the deformation simulation. A specific deformation is necessary for the successful assembly of the doll.