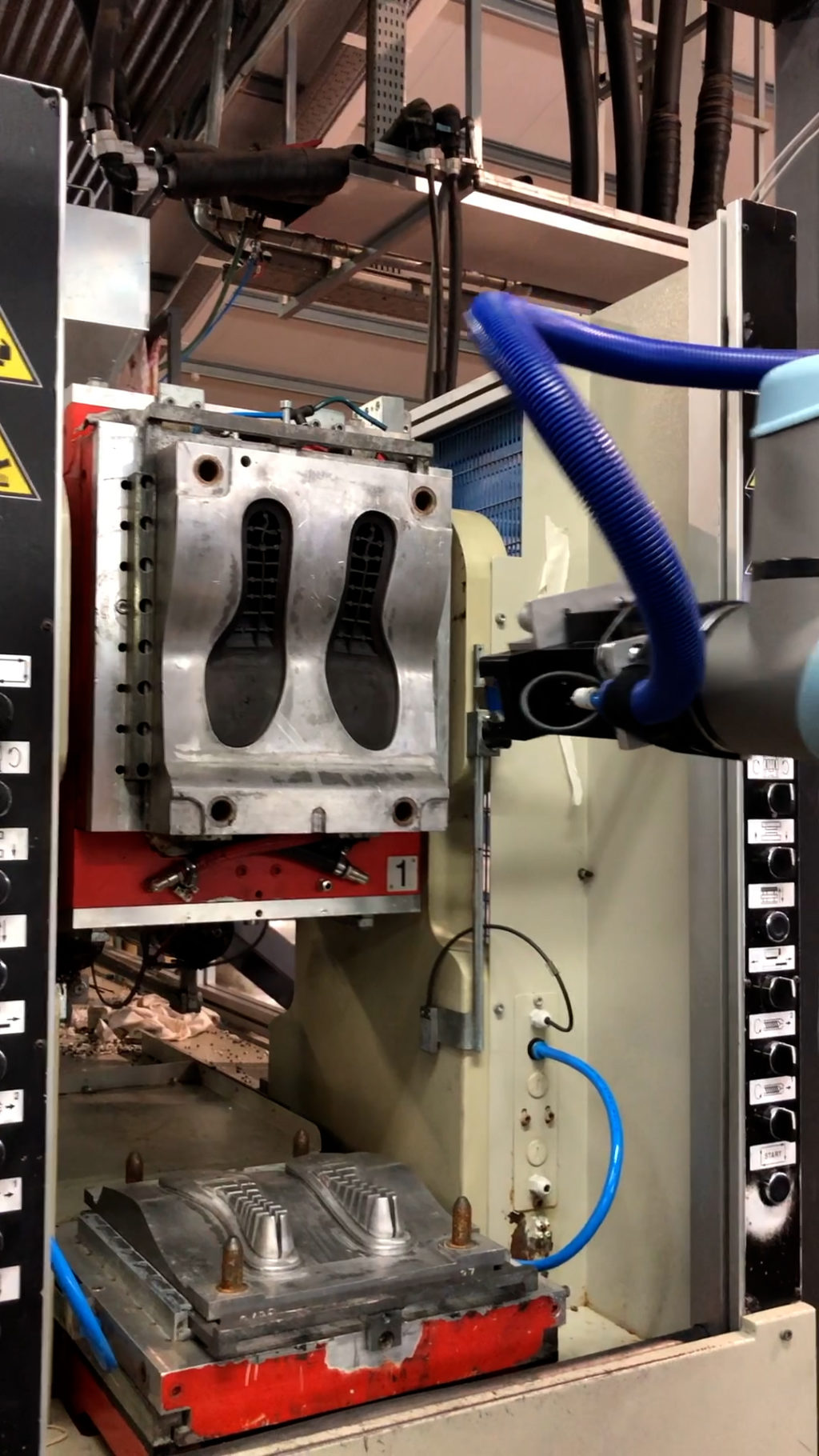
In the last weeks we have been working intensively at PLASTINHER URBAN facilities. The mock-up developed during the previous period at INESCOP premises has evolved towards a more industrial implementation as we have installed the robotic cell to work on a real injection moulding machine. PLASTINHER staff set the stage to allow us to install the robot on a pedestal base, anchored to the floor, and they created a working area for us.
We have worked together to install the vision system that makes it possible to locate the sole in the mould and record the extraction trajectory carried out by an expert operator; this allows us to train the robot in the task that requires not only strength but also dexterity… And we are already extracting soles from the mould!!!
Currently, we are working on integrating the utilities into a user interface to simplify the process in order to allow the operator to perform the robot training operation autonomously, acting as the supervisor of the system.