In the last phase of the Softmanbot project, ZIMMER supports the end users and their technology partners in the final implementation of the various use cases, in addition to completing its own developments for the integration of direct force control in the gripper control system for handling soft materials.
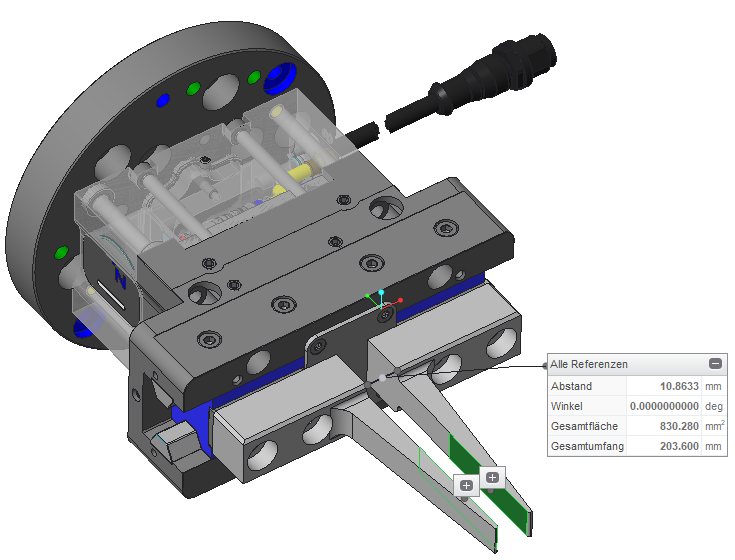
At various points, the gripper systems consisting of the basic gripper and the gripper fingers still have to be adapted to the real conditions at the end users’ facilities. In particular, minor adjustments are still required to the gripper fingers, but these are essential for successful implementation of the automation task.