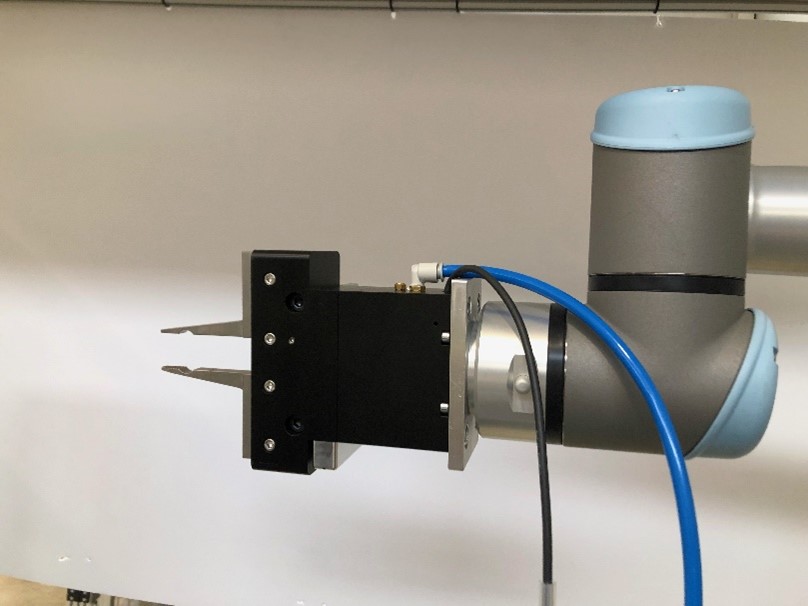
Work on sensored fingers
At #ZimmerGroup, the final steps are currently being taken to integrate the force sensors directly into the gripper prototype developed for #SOFTMANBOT. The aim is to bring this into operation next month at our partner #JUEMA ‘s industrial demonstrator. The sensor data is fed directly into the controller of the mechatronic gripper using a special…
Read more




Recent Comments