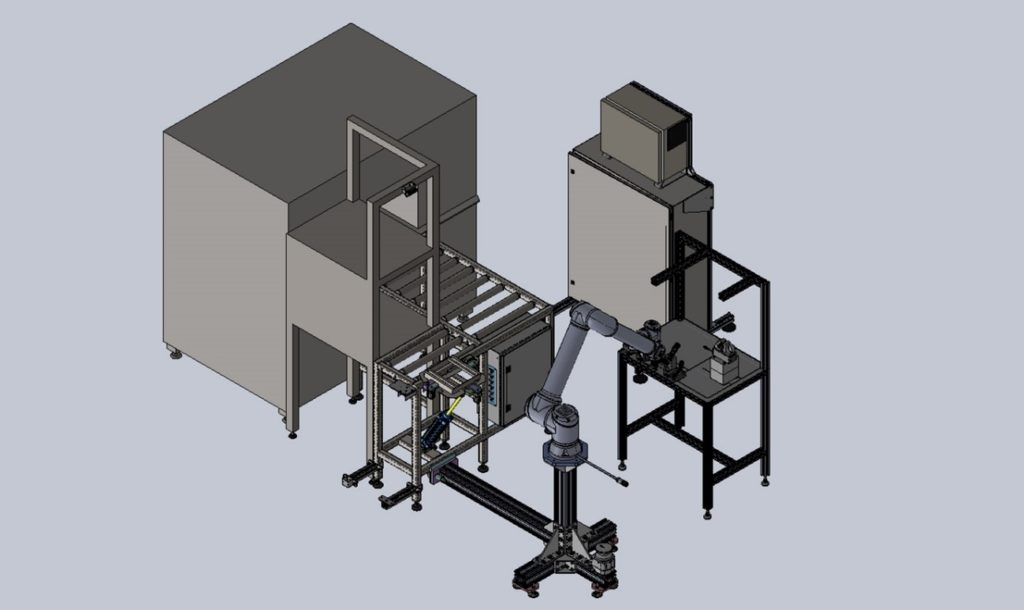
The mock-up of the SOFTMANBOT project is almost finished. We have the final design that will be implemented in the factory later this year.
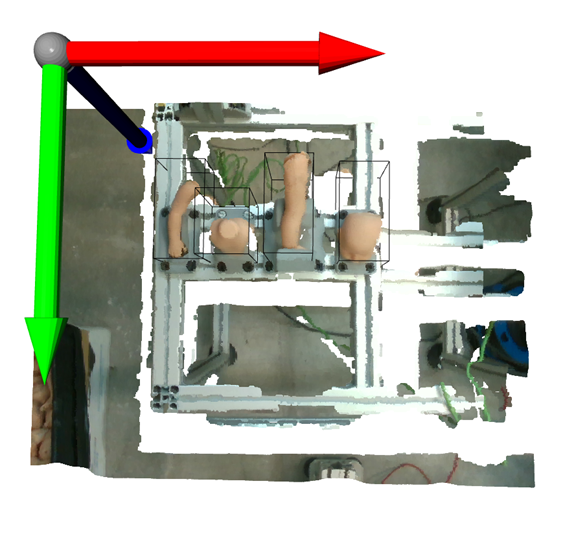
Currently, the latest devices such as security scanners and other cameras are being tested to be added to the final system. Also, as this project involves two different tasks (Demoulding and Assembly), during the last period, we have been working on the grasping of each part of the doll in order to assemble them.
To perform this grasping a vision algorithm is used to segment the parts of the doll from the whole environment.