During the last months, INESCOP has worked in close collaboration with PLASTINHER URBAN on the transition from the mock-up to the final implementation at PLASTINHER’s facilities. To this end, the mockup at INESCOP has evolved towards a more robust factory setup.
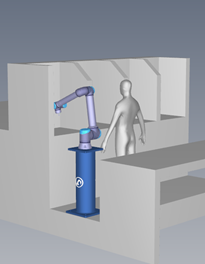
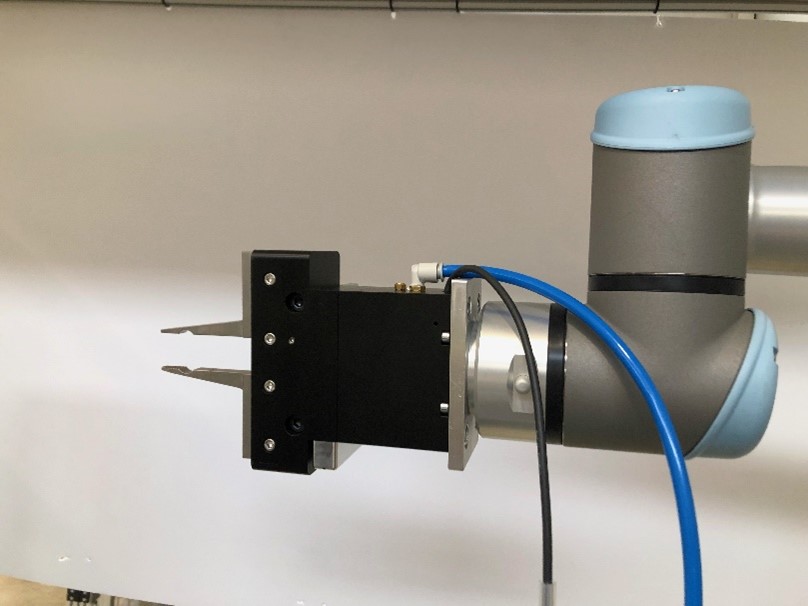
First, all the hardware components that will form part of the final setup have been manufactured and integrated. As mentioned on previous deliverables and posts, the robot will share the workspace with the operator and their security is our priority. Therefore, the UR10e robot is mounted on an iron pedestal base, robust enough to support the high forces exerted by the robot while demolding and compact enough to hold the robot folded when the operator enters the workspace area. Second, the final grippers have been delivered by Zimmer and a 3D camera has been mounted on them to give the system the sense of view.
Another key component is the usability of the final solution, our standards are to develop robotic solutions that are easy to use by non-experts while having a big impact on their work efficiency. To this end, we are working on a teleoperation solution that will allow the operators to transfer their knowledge and control the robotic arm system. Such teleoperation is divided into two parts: first the operator records the demolding trajectory making use of their day-to-day pliers and an inertial measurement unit sensor (IMU) sensor attached. Once the trajectory has been recorded, the data from the IMU is processed and transferred to the robotic system, which deals with the repetitive nature of the task, extracting as many soles as needed during production.
At the time of writing this blog post, the teleoperation control is still under development. We have achieved correct orientation of the robotic arm; however the translation reconstruction part is still a challenge. We hope that by the next time we are updating you with INESCOP’s news, such challenge has been overcome.