
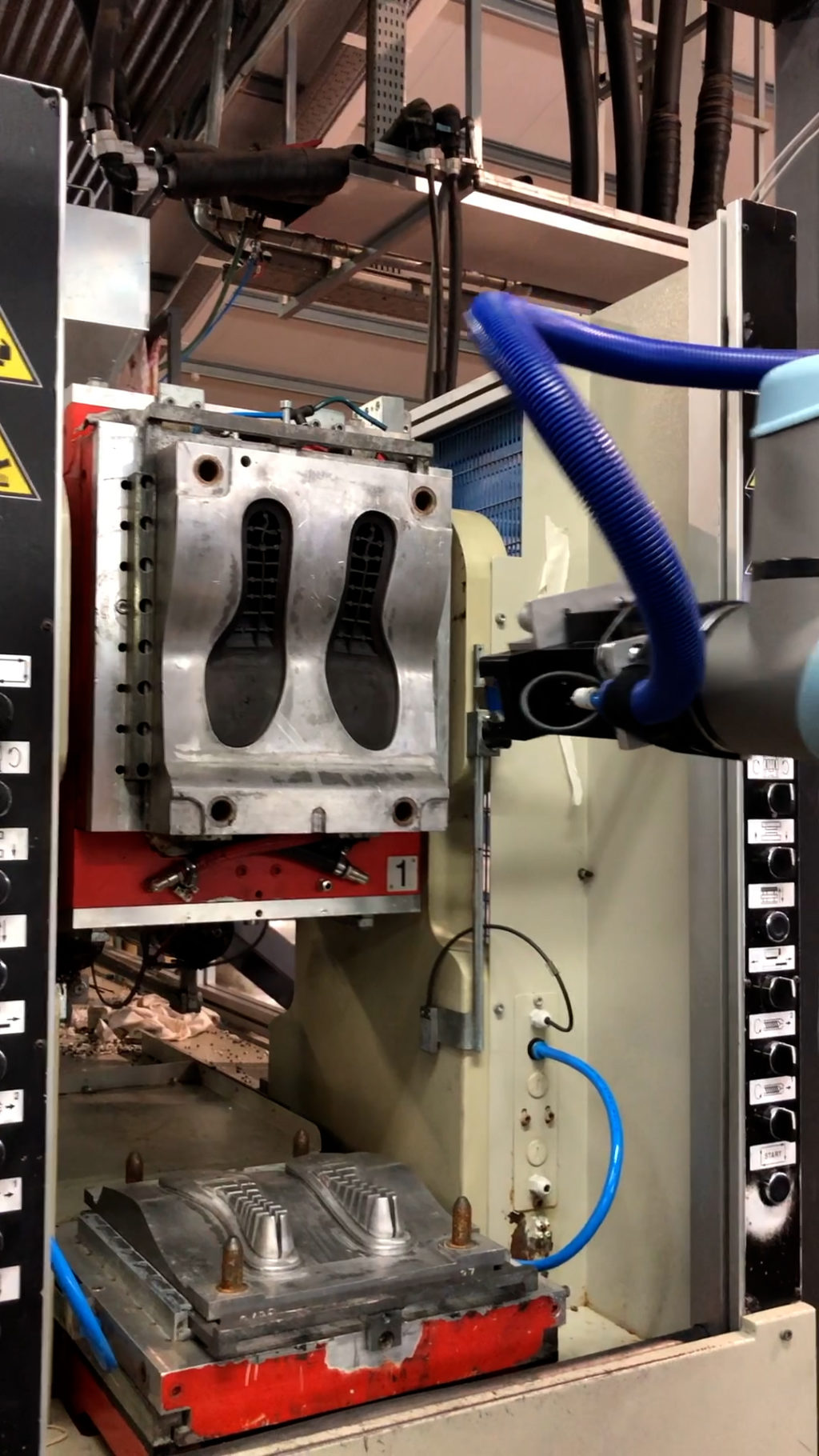
Innovative and universal approach for handling deformable and flexible materials
In SOFTMANBOT EU H2020, we are developing an innovative and universal approach for handling deformable and flexible materials for the industry.Decathlon is engaged in the project as an industrial partner, with the aim of testing this new intelligent robotic system.Working together with our partners ISTITUTO ITALIANO DI TECNOLOGIA, it has been developed an intelligent robotic…
Read more



Recent Comments