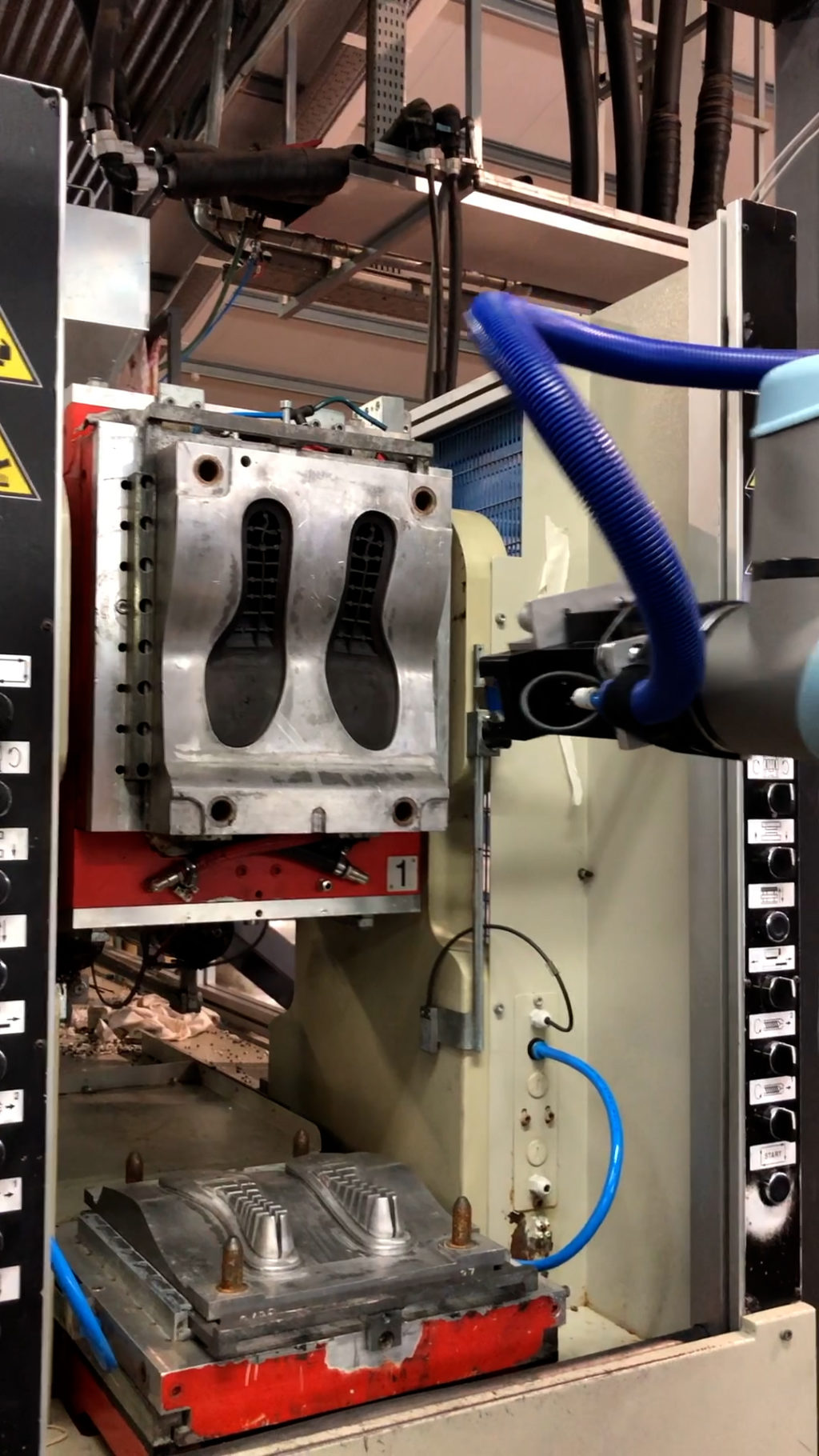
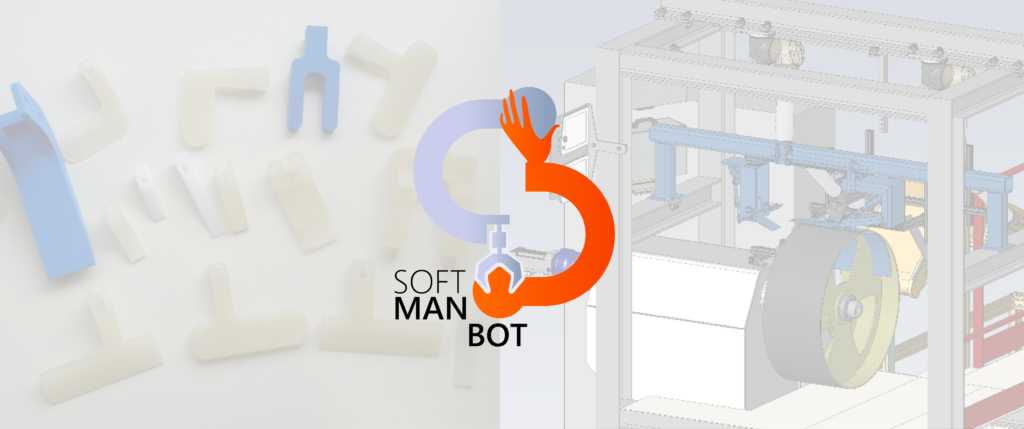
Footwear use-case
In the last weeks we have been working intensively at PLASTINHER URBAN facilities. The mock-up developed during the previous period at INESCOP premises has evolved towards a more industrial implementation as we have installed the robotic cell to work on a real injection moulding machine. PLASTINHER staff set the stage to allow us to install…
Read more


Recent Comments